


機(jī)器視覺(jué)引導(dǎo)如何實(shí)現(xiàn)機(jī)械手的動(dòng)態(tài)抓取
在傳統(tǒng)工業(yè)自動(dòng)化中,機(jī)械臂常被編程執(zhí)行固定路徑的重復(fù)動(dòng)作,當(dāng)傳送帶上的工件開(kāi)始以不確定的軌跡和速度運(yùn)動(dòng)時(shí),這套固定的程序便難以進(jìn)行。現(xiàn)代柔性制造與智慧物流的核心挑戰(zhàn)之一,正是如何讓機(jī)械臂具備實(shí)時(shí)感知與動(dòng)態(tài)響應(yīng)的能力,精準(zhǔn)抓取運(yùn)動(dòng)中的目標(biāo)。機(jī)器視覺(jué)引導(dǎo)的動(dòng)態(tài)跟隨抓取技術(shù),便是解決這一難題的鑰匙,它通過(guò)構(gòu)建一個(gè)高速閉環(huán)的系統(tǒng),讓機(jī)械臂化身為能夠預(yù)判和抓取移動(dòng)目標(biāo)的智能體。

一、 動(dòng)態(tài)跟隨抓取核心原理
機(jī)器視覺(jué)引導(dǎo)機(jī)械手動(dòng)態(tài)取技術(shù)的本質(zhì),是建立一個(gè)精確且高速的空間信息轉(zhuǎn)換與運(yùn)動(dòng)預(yù)測(cè)模型。其核心在于處理多個(gè)坐標(biāo)系之間的動(dòng)態(tài)關(guān)系,系統(tǒng)至少涉及四個(gè)關(guān)鍵坐標(biāo)系,機(jī)器人基坐標(biāo)系、傳送帶坐標(biāo)系、視覺(jué)坐標(biāo)系以及動(dòng)態(tài)的物體坐標(biāo)系。
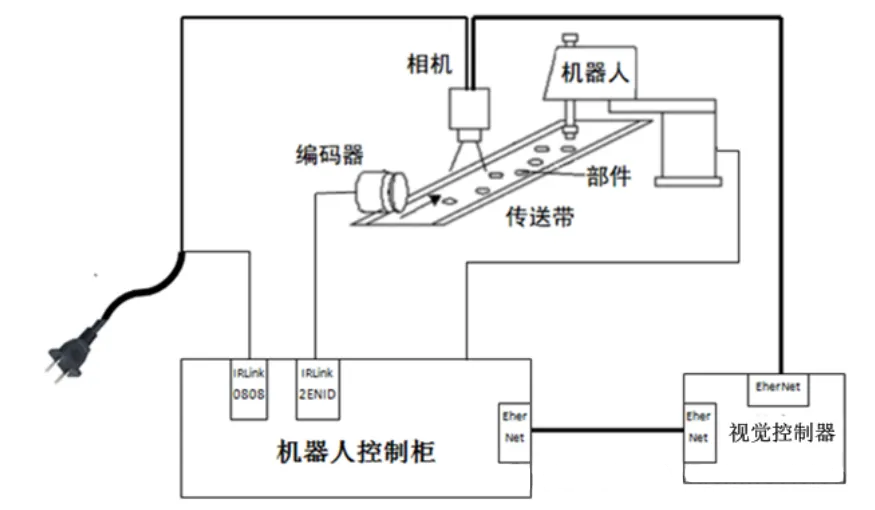
整個(gè)過(guò)程始于精準(zhǔn)的感知。安裝在固定位置的工業(yè)相機(jī),通過(guò)硬件觸發(fā)方式,在精確的時(shí)刻對(duì)傳送帶進(jìn)行拍照。相機(jī)與傳送帶的相對(duì)位置通過(guò)標(biāo)定確定,構(gòu)成了視覺(jué)坐標(biāo)系。先進(jìn)的圖像處理算法在獲取的圖像中,快速識(shí)別并提取出工件上預(yù)先定義的標(biāo)識(shí)或特征,計(jì)算出該工件在視覺(jué)坐標(biāo)系下的瞬時(shí)二維位置。然而,僅有視覺(jué)提供的單幀“快照”是不夠的,它無(wú)法直接提供工件的連續(xù)運(yùn)動(dòng)狀態(tài)。
因此,系統(tǒng)引入了編碼器來(lái)檢測(cè)傳送帶的實(shí)時(shí)位移。視覺(jué)系統(tǒng)將識(shí)別到的工件位置,結(jié)合編碼器反饋的傳送帶位移量,共同推算出工件在傳送帶坐標(biāo)系下的連續(xù)運(yùn)動(dòng)軌跡。此時(shí),一個(gè)虛擬的、隨工件一起移動(dòng)的物體坐標(biāo)系被建立起來(lái),它精確描述了工件在空間中的位置與朝向。
最終,通過(guò)已知的傳送帶坐標(biāo)系與機(jī)器人基坐標(biāo)系之間的固定變換關(guān)系,系統(tǒng)便能實(shí)時(shí)計(jì)算出動(dòng)態(tài)物體坐標(biāo)系在機(jī)器人世界中的準(zhǔn)確位姿。這不僅僅是追蹤當(dāng)前位置,更是通過(guò)算法對(duì)工件的運(yùn)動(dòng)速度和方向進(jìn)行估計(jì),從而預(yù)測(cè)其未來(lái)的位置,為機(jī)械臂規(guī)劃出一條超前的抓取軌跡。
二、 并行的檢測(cè)與跟隨閉環(huán)
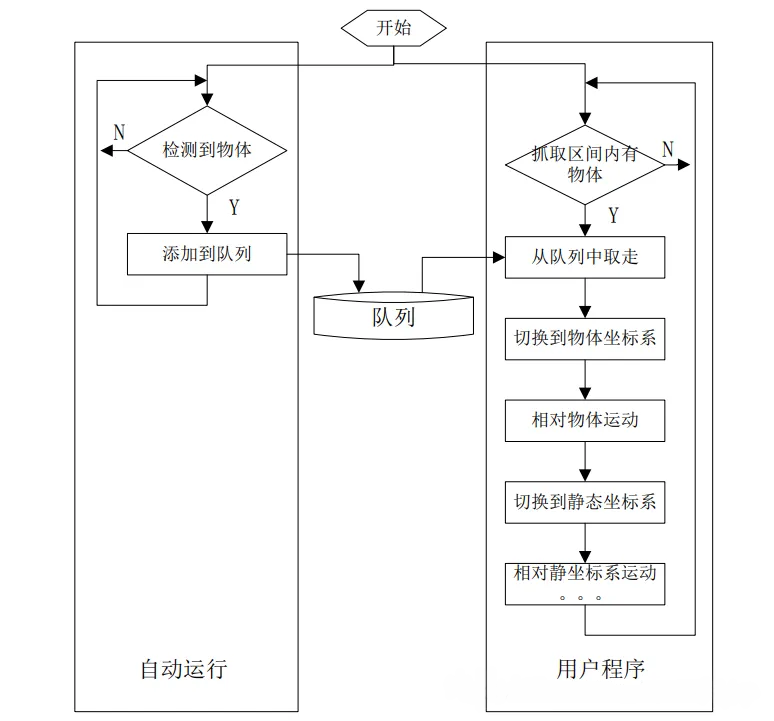
動(dòng)態(tài)跟隨抓取并非簡(jiǎn)單的串行步驟,而是一個(gè)高度協(xié)同、并行處理的精密閉環(huán)。其工作流程可清晰地分為檢測(cè)與跟隨運(yùn)動(dòng)兩大并行的線程,它們通過(guò)共享的數(shù)據(jù)隊(duì)列進(jìn)行無(wú)縫銜接。
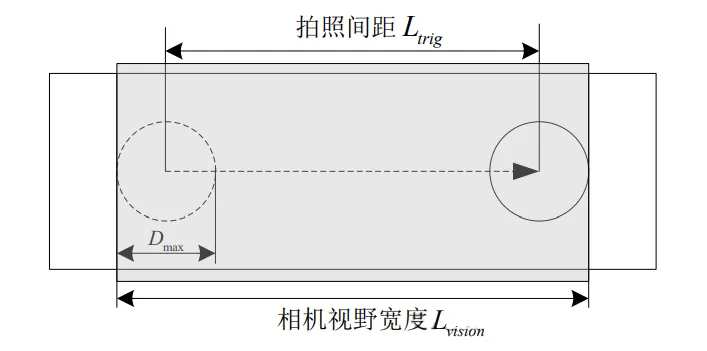
在檢測(cè)線程中,系統(tǒng)持續(xù)運(yùn)行。視覺(jué)系統(tǒng)根據(jù)預(yù)設(shè)的拍照間距周期性地觸發(fā)拍照。這個(gè)間距的設(shè)置至關(guān)重要,需確保相鄰兩次拍攝的視野有適當(dāng)重疊,其寬度需大于工件標(biāo)識(shí)的最大尺寸,以保證每個(gè)工件至少能被完整捕獲一次,避免漏檢。
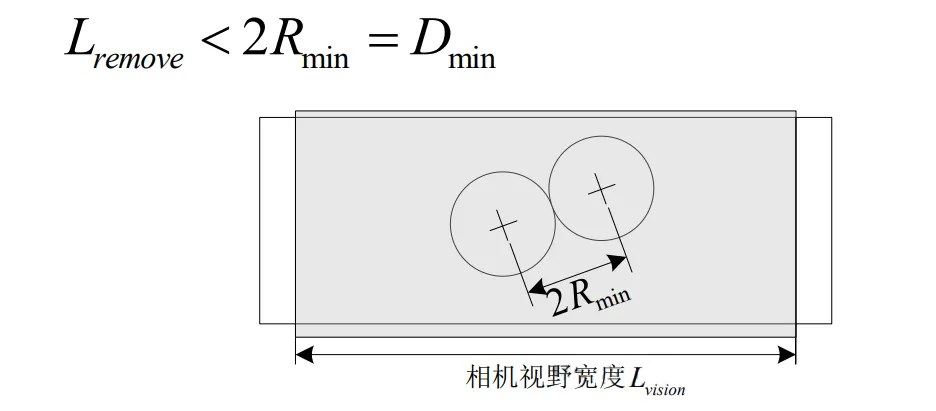
同時(shí),算法會(huì)設(shè)定一個(gè)重復(fù)檢測(cè)判定距離,當(dāng)同一工件因視野重疊被相鄰兩次拍攝同時(shí)識(shí)別時(shí),系統(tǒng)能根據(jù)其位置接近程度進(jìn)行智能去重,確保每個(gè)目標(biāo)在隊(duì)列中只被記錄一次。識(shí)別成功的工件,連同其計(jì)算出的實(shí)時(shí)位置、速度矢量以及預(yù)設(shè)的工件高度參數(shù),被作為一個(gè)完整的動(dòng)態(tài)坐標(biāo)信息包,放入一個(gè)先進(jìn)先出的傳送帶對(duì)象隊(duì)列中。
與此同時(shí),跟隨運(yùn)動(dòng)線程獨(dú)立且同步地運(yùn)行。機(jī)器人控制器不斷從隊(duì)列頭部獲取最新的目標(biāo)動(dòng)態(tài)坐標(biāo)包。基于此,路徑規(guī)劃器不再是計(jì)算指向工件當(dāng)前位置的路徑,而是解算一條能夠令機(jī)械臂末端執(zhí)行器在未來(lái)某一時(shí)刻、空間某一點(diǎn),與運(yùn)動(dòng)工件實(shí)現(xiàn)速度同步、位置重合的交匯軌跡。
這條軌跡需充分考慮機(jī)器人自身的運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)極限。規(guī)劃完成后,高響應(yīng)的伺服控制系統(tǒng)驅(qū)動(dòng)機(jī)械臂各軸嚴(yán)格跟隨這條動(dòng)態(tài)軌跡。當(dāng)末端執(zhí)行器與工件成功交匯并實(shí)施抓取后,一個(gè)抓取周期完成,系統(tǒng)隨即從隊(duì)列中提取下一個(gè)目標(biāo),開(kāi)始新的循環(huán)。這種檢測(cè)與運(yùn)動(dòng)的并行化,是實(shí)現(xiàn)高節(jié)拍、不間斷作業(yè)的關(guān)鍵。
三、 典型的應(yīng)用場(chǎng)景
這項(xiàng)技術(shù)極大地拓展了工業(yè)機(jī)器人的應(yīng)用邊界,使其從結(jié)構(gòu)化環(huán)境走向非結(jié)構(gòu)化的動(dòng)態(tài)場(chǎng)景,核心解決的是運(yùn)動(dòng)中對(duì)運(yùn)動(dòng)目標(biāo)的精準(zhǔn)作業(yè)問(wèn)題。
最典型的應(yīng)用是高速流水線的精準(zhǔn)分揀與包裝。在食品、藥品、化妝品包裝線上,產(chǎn)品在傳送帶上高速移動(dòng)且間距不一。視覺(jué)系統(tǒng)快速識(shí)別產(chǎn)品類(lèi)型、顏色或包裝缺陷,動(dòng)態(tài)跟隨系統(tǒng)則引導(dǎo)高速并聯(lián)機(jī)器人或關(guān)節(jié)機(jī)器人,以極高的節(jié)拍對(duì)運(yùn)動(dòng)中的產(chǎn)品進(jìn)行分選、裝箱或貼標(biāo)。系統(tǒng)能夠處理產(chǎn)品流動(dòng)的不均勻性,確保操作精度和生產(chǎn)線整體效率。

此外,在物流包裹分揀和光伏板、玻璃板等易碎板材的搬運(yùn)中,該技術(shù)也至關(guān)重要。對(duì)于物流包裹,系統(tǒng)動(dòng)態(tài)讀取面單信息并實(shí)時(shí)計(jì)算抓取點(diǎn),引導(dǎo)機(jī)械臂在包裹不間斷運(yùn)輸中將其投入對(duì)應(yīng)格口。對(duì)于大型易碎板材,動(dòng)態(tài)跟隨技術(shù)可實(shí)現(xiàn)機(jī)械臂與生產(chǎn)線運(yùn)動(dòng)的絕對(duì)同步,在零相對(duì)速度下進(jìn)行接觸和取放,徹底避免了因加速度沖擊導(dǎo)致的材料破損。
四、 總結(jié)
機(jī)器視覺(jué)引導(dǎo)的機(jī)械手動(dòng)態(tài)跟隨抓取技術(shù),通過(guò)將實(shí)時(shí)視覺(jué)感知、多坐標(biāo)系統(tǒng)合與高動(dòng)態(tài)運(yùn)動(dòng)控制深度集成,成功賦予了自動(dòng)化設(shè)備在非結(jié)構(gòu)化動(dòng)態(tài)環(huán)境中的作業(yè)能力。它打破了固定自動(dòng)化程序的局限,是構(gòu)建柔性智能制造體系、智慧物流系統(tǒng)的核心技術(shù)模塊。
未來(lái),這項(xiàng)技術(shù)將不僅局限于工業(yè)圍欄之內(nèi),更將向農(nóng)業(yè)自動(dòng)化采摘、服務(wù)機(jī)器人乃至特種作業(yè)領(lǐng)域滲透,持續(xù)推動(dòng)機(jī)器人與物理世界進(jìn)行更自然、更敏捷、更智能的交互,成為連接數(shù)字指令與物理執(zhí)行的關(guān)鍵橋梁。




 投訴建議
投訴建議
提交

全自動(dòng)影像測(cè)量?jī)x:開(kāi)啟微米級(jí)精密測(cè)量
MasterAlign高精度2D視覺(jué)系統(tǒng)
深入解析遠(yuǎn)心鏡頭的工作原理與選型

雙翌一鍵式閃測(cè)儀,人人都是測(cè)量專(zhuān)家

機(jī)器視覺(jué)的手機(jī)屏幕上料引導(dǎo)應(yīng)用