


3D 工業(yè)相機(jī)避坑指南:從選型到落地
一、前期準(zhǔn)備:明確需求是避坑第一步
(一)精準(zhǔn)定位應(yīng)用場(chǎng)景
先確定相機(jī)用途,如質(zhì)量檢測(cè)需關(guān)注表面缺陷精度,機(jī)器人引導(dǎo)需高動(dòng)態(tài)響應(yīng),物流分揀則側(cè)重速度與視野范圍。不同場(chǎng)景對(duì)相機(jī)的精度(亞毫米級(jí) vs 厘米級(jí))、幀率(高速產(chǎn)線需≥50 幀 / 秒)、工作距離(200mm 內(nèi)精密檢測(cè) vs10 米外大范圍掃描)要求差異顯著,盲目選擇易導(dǎo)致性能過剩或不足。
(二)建立核心參數(shù)清單
列出必選參數(shù)優(yōu)先級(jí),如精密裝配優(yōu)先 “測(cè)量精度(±0.1mm 內(nèi))” 和 “重復(fù)定位精度”,惡劣環(huán)境優(yōu)先 “IP67 防護(hù)等級(jí)” 和 “抗環(huán)境光能力(≥10 萬 Lux)”。避免被廠商宣傳的 “高分辨率” 單一參數(shù)誤導(dǎo),需結(jié)合實(shí)際檢測(cè)精度反推像素需求(如 10mm 視野、0.05mm 精度需≥200 萬像素)。
![]()

二、核心參數(shù)解析:這些 “陷阱” 藏得最深
(一)技術(shù)原理:選技術(shù)比堆參數(shù)更重要
1. 結(jié)構(gòu)光相機(jī):高精度但怕強(qiáng)光
適用于精密零件檢測(cè)(如手機(jī)芯片貼裝),通過投射編碼圖案獲取三維點(diǎn)云,精度可達(dá) ±0.1mm。但強(qiáng)光環(huán)境(如車間窗口直射)易導(dǎo)致圖案失真,需加裝漫射板或選擇抗光型,避免漏檢透明 / 反光件(如汽車尾燈)。
2. ToF 相機(jī):快但邊緣模糊
適合物流體積測(cè)量(如包裹長(zhǎng)寬高檢測(cè)),通過飛行時(shí)間計(jì)算深度,幀率高(30 幀 / 秒以上)、抗環(huán)境光強(qiáng)。但缺陷在于邊緣精度低(±1mm 以上),且近距離(<500mm)易受多徑反射干擾,檢測(cè)曲面物體(如弧形工件)時(shí)易出現(xiàn)數(shù)據(jù)斷層。
3. 雙目立體視覺:性價(jià)比高但依賴紋理
基于視差原理計(jì)算深度,成本相對(duì)較低。但對(duì)無紋理物體,匹配失敗率高,且需要嚴(yán)格校準(zhǔn)雙攝像頭基線,安裝誤差超過 1mm 即導(dǎo)致深度圖偏移,適合低速靜態(tài)場(chǎng)景(如五金件分揀)。
4. 3D 線激光輪廓測(cè)量?jī)x:精度與適應(yīng)性均優(yōu)秀
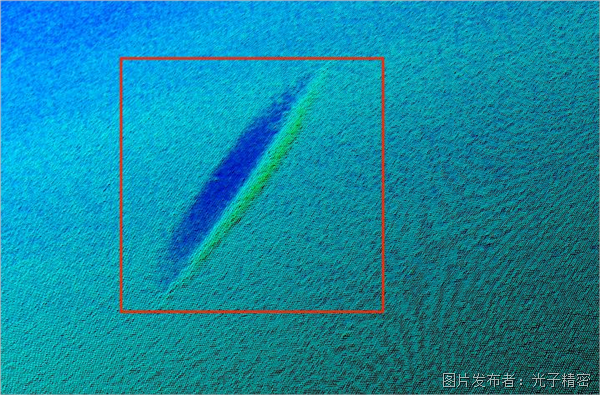
通過激光線掃描物體表面,逐行生成三維輪廓,兼具高精度與高動(dòng)態(tài)響應(yīng)(如光子精密GL-8000系列3D線激光輪廓測(cè)量?jī)x,線性精度達(dá)±0.02% of F.S.,重復(fù)精度達(dá)0.3μm,掃描速度可達(dá)49kHz)。其獨(dú)特優(yōu)勢(shì)在于抗環(huán)境光能力和復(fù)雜表面適應(yīng)性, 對(duì)于反光金屬件,如汽車輪轂、透明塑料瓶、粗糙鑄件等傳統(tǒng)技術(shù)難以處理的場(chǎng)景,一些尖端3D線激光輪廓測(cè)量?jī)x可通過高動(dòng)態(tài)HDR技術(shù)和雜反光抑制功能,避免采集圖像過曝或欠曝。例如光子精密GL-8000系列在軸承平面度檢測(cè)中,能精準(zhǔn)捕捉微米級(jí)段差,而結(jié)構(gòu)光易因反光形成數(shù)據(jù)空洞,ToF 則邊緣模糊無法識(shí)別。
量?jī)x2.png")
(二)精度標(biāo)稱:警惕 “實(shí)驗(yàn)室數(shù)據(jù)” 陷阱
廠商標(biāo)注的 “測(cè)量精度” 多為理想工況(恒溫、無反光、標(biāo)準(zhǔn)標(biāo)定板)下的數(shù)據(jù),實(shí)際產(chǎn)線需關(guān)注 “工作精度”。例如某進(jìn)口品牌標(biāo)稱 ±0.05mm,實(shí)測(cè)在振動(dòng)環(huán)境(±5Hz)下精度下降至 ±0.3mm,建議要求廠商提供 “典型工況測(cè)試報(bào)告”,或?qū)嵉販y(cè)試相同工件的重復(fù)測(cè)量誤差(連續(xù) 10 次檢測(cè)偏差應(yīng) <±0.1mm)。
(三)接口兼容性:小心 “買了相機(jī)連不上系統(tǒng)”
<span style="margin: 0px; padding: 0px; font-family: Inter, -apple-system, BlinkMacSystemFont, " segoe="" ui",="" "sf="" pro="" sc",="" display",="" icons",="" "pingfang="" "hiragino="" sans="" gb",="" "microsoft="" yahei",="" "helvetica="" neue",="" helvetica,="" arial,="" sans-serif;="" white-space:="" pre-wrap;"="">優(yōu)先選擇支持主流協(xié)議(如 EtherCAT、TCP/IP)的相機(jī),避免定制化接口(如專屬 USB 驅(qū)動(dòng))。3D 工業(yè)相機(jī)因需高速傳輸線掃描數(shù)據(jù),更需關(guān)注接口帶寬 。建議提前確認(rèn)相機(jī)是否擁有配套的專用軟件,如光子精密3D工業(yè)相機(jī)擁有專業(yè)軟件——PhoskeyVision,是一款專為3D高精度定位、測(cè)量和缺陷檢測(cè)設(shè)計(jì)的軟件。通過圖形化交互和可視化配置,為用戶提供功能豐富、操作便捷的軟件開發(fā)平臺(tái),實(shí)現(xiàn)了2D/3D檢測(cè)和多功能模塊,覆蓋了多種應(yīng)用場(chǎng)景。
三、避坑要點(diǎn):從采購(gòu)到落地的 4 個(gè)關(guān)鍵雷區(qū)
(一)盲目追求 “進(jìn)口品牌”:國(guó)產(chǎn)未必輸,進(jìn)口未必適
進(jìn)口品牌(如康耐視、基恩士)在高精度領(lǐng)域表現(xiàn)優(yōu)異,但價(jià)格高、交貨周期長(zhǎng)。國(guó)產(chǎn)品牌(如光子精密、海康)性價(jià)比高,價(jià)格低 30%-50%、技術(shù)支持響應(yīng)快,在多個(gè)高精度測(cè)量場(chǎng)景中已經(jīng)成功應(yīng)用,實(shí)現(xiàn)國(guó)產(chǎn)代替。
(二)忽視環(huán)境適應(yīng)性:高溫、粉塵、振動(dòng)都是 “隱形殺手”
制造車間需 防水防塵 + 寬溫(-20℃~60℃),IP67 防護(hù)等級(jí)的3D在此類場(chǎng)景更具優(yōu)勢(shì) —— 其采用全金屬密封設(shè)計(jì),可在粉塵濃度≥100mg/m3 環(huán)境穩(wěn)定運(yùn)行。一體化光學(xué)設(shè)計(jì)的3D工業(yè)相機(jī)也比雙目相機(jī)的分體式結(jié)構(gòu)更抗位移。如忽視環(huán)境適應(yīng)性,很可能會(huì)出現(xiàn)檢測(cè)誤差,甚至被迫整機(jī)更換的情況。
(三)軟件生態(tài)缺失:“相機(jī)好用,算法難搞” 最致命
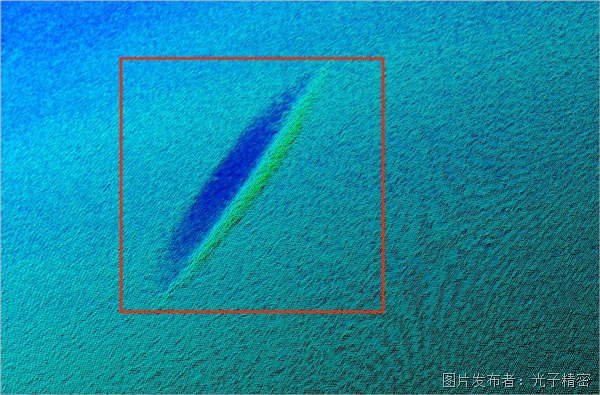
優(yōu)先選擇自帶成熟算法庫(kù)的相機(jī),如某 3C 廠商采購(gòu)無配套軟件的結(jié)構(gòu)光相機(jī),耗時(shí) 6 個(gè)月開發(fā)分揀算法,成本超相機(jī)本身 3 倍。而同期選用光子精密 GL-8000 系列 3D 線激光輪廓測(cè)量?jī)x的同行,通過PhoskeyVision軟件中自帶的算法 ,3 天即完成部署,可實(shí)時(shí)輸出 “合格 / 不合格” 信號(hào)。
量?jī)x.png")
(四)安裝調(diào)試:“小尺寸” 未必好裝,“輕量化” 未必省成本
機(jī)械臂末端安裝需關(guān)注相機(jī)重量(如 <1kg 可減少負(fù)載),建議提前用 3D 模型模擬安裝空間,確認(rèn)線纜長(zhǎng)度,檢測(cè)是否需延長(zhǎng)線和標(biāo)定難度。光子精密 GL-8000 系列 3D 線激光輪廓測(cè)量?jī)x的緊湊設(shè)計(jì)更適配狹小空間,且單激光頭設(shè)計(jì)比結(jié)構(gòu)光的 “相機(jī) + 投影儀” 組合減少 50% 安裝步驟。
四、總結(jié):采購(gòu)3D工業(yè)相機(jī)前必問的 8 個(gè)問題
精度,速度,檢測(cè)距離等各項(xiàng)參數(shù)?
能否提供同類型工件的實(shí)測(cè)數(shù)據(jù)?
是否支持現(xiàn)有控制系統(tǒng) / 軟件?
典型工況下的使用時(shí)長(zhǎng)是多久?
防護(hù)等級(jí)是否滿足現(xiàn)場(chǎng)環(huán)境?
軟件是否支持二次開發(fā)?
不同材質(zhì)工件的表現(xiàn)差異?
是否有行業(yè)案例參考?
3D 工業(yè)相機(jī)選型不是 “選參數(shù)最高的”,而是 “選最適配場(chǎng)景的”。從需求梳理到落地調(diào)試,每個(gè)環(huán)節(jié)都可能暗藏陷阱,避開廠商宣傳盲區(qū),尤其在精密測(cè)量、惡劣環(huán)境、高速檢測(cè)等場(chǎng)景,優(yōu)先選擇該系列設(shè)備往往能少走彎路。




 投訴建議
投訴建議
提交

3D相機(jī)各個(gè)精度解析

3D線激光輪廓測(cè)量?jī)x解鎖食品質(zhì)檢效率密碼
3D線激光輪廓測(cè)量?jī)x拼接檢測(cè)案例
3D線激光輪廓測(cè)量?jī)x360°拼接檢測(cè)
閃測(cè)儀案例丨手機(jī)中框如何突破尺寸檢測(cè)瓶頸