


2.5D特征檢測(cè)攻-悟空相位成像系統(tǒng)
引言:隨著工業(yè)自動(dòng)化的迅猛發(fā)展,機(jī)器視覺的應(yīng)用已經(jīng)越來越多深入到智能制造設(shè)備的檢測(cè)領(lǐng)域,其中包含了不同的檢測(cè)類別,如識(shí)別定位、輪廓尺寸、外觀缺陷等檢測(cè)。沃德普致力于提供一副成像特征明顯的圖像,提供行業(yè)領(lǐng)先的系統(tǒng)性成像解決方案。本文詳細(xì)介紹的是悟空相位成像系統(tǒng),通過一次掃描,可以檢測(cè)2D類型的特征,同時(shí)獲取2.5D類型的特征,解決壓痕類、凹凸點(diǎn)類、細(xì)小瑕疵類的檢測(cè)難題。
一、悟空相位成像系統(tǒng)的原理
“悟空相位成像系統(tǒng)”采取了相位偏折技術(shù)對(duì)于獲取的圖像進(jìn)行計(jì)算和特征放大。相位偏折技術(shù)在廣義上屬于結(jié)構(gòu)光的一種(也被稱之為條紋反射法),主要應(yīng)用于檢測(cè)光滑的類鏡面物體表面連續(xù)變化的特征,我們常稱的2.5D特征。一個(gè)完整的光學(xué)檢測(cè)系統(tǒng),包含了相位成像光源、相機(jī)鏡頭模塊、圖像處理與分析、數(shù)據(jù)處理、用戶界面等組件。
通過計(jì)算編程正弦條紋投影至待測(cè)物上,利用相機(jī)采集待測(cè)物表面經(jīng)過調(diào)制的彎曲條紋,進(jìn)行相機(jī)標(biāo)定。得到相機(jī)內(nèi)參后,將得到的調(diào)制條紋圖進(jìn)行與計(jì)算或是測(cè)量得到的系統(tǒng)幾何結(jié)構(gòu)參數(shù)進(jìn)行運(yùn)算得到梯度關(guān)系,最后進(jìn)行積分重建,將梯度關(guān)系轉(zhuǎn)換為高度關(guān)系。如下圖1-1所示。

圖1-1
在實(shí)際的測(cè)量計(jì)算過程中,單一方向的正弦條紋所提供的梯度信息存在一定的局限性。因此,在實(shí)踐應(yīng)用中,采用八張不同方向的投影條紋圖案來獲取表面在水平和豎直兩個(gè)方向上的梯度分布。只有對(duì)這兩個(gè)方向的梯度分布進(jìn)行積分處理,才能準(zhǔn)確地獲取最終的高度信息。
線掃檢測(cè)中,通過相位線陣光源輸出高頻信號(hào)給線掃相機(jī),將圖像數(shù)據(jù)直接傳至圖像預(yù)處理器,并處理獲得對(duì)應(yīng)的八張相位原圖和六張預(yù)處理效果圖。六張預(yù)處理器效果圖包含形狀圖1、形狀圖2、鏡面反射圖、光澤比圖、漫反射圖、標(biāo)準(zhǔn)圖,可分別對(duì)圖像具有2.5D凹凸的特征、細(xì)小劃傷、臟污異物、產(chǎn)品輪廓定位進(jìn)行提取。
一、悟空相位成像系統(tǒng)的構(gòu)成 
圖2-1
用戶可根據(jù)需求選擇面陣/線掃的相位光源、根據(jù)被測(cè)物的成像視野和精度選擇合適的相機(jī)鏡頭,提供圖像預(yù)處理器及內(nèi)置圖像預(yù)處理軟件對(duì)相機(jī)采集的原圖直接進(jìn)行圖像預(yù)處理。具體產(chǎn)品規(guī)格見產(chǎn)品說明手冊(cè),本文不做詳細(xì)說明。
三、悟空相位成像系統(tǒng)的特點(diǎn)
以下面兩組成像對(duì)比圖進(jìn)行展開:圖3-1為常規(guī)方案拍攝劃痕、臟污及氣泡的成像效果,面對(duì)細(xì)微瑕疵,難以對(duì)特征進(jìn)行處理和提取。圖3-2為悟空相位成像系統(tǒng)提供的效果圖,可以呈現(xiàn)上述難以成像的特征,簡(jiǎn)化后期的算法處理難度。

圖3-1 
圖3-2
特點(diǎn)1 突顯2.5D特征變化


特點(diǎn)2 消除背景干擾

特點(diǎn)3 突顯細(xì)小劃痕缺陷

特點(diǎn)4 適應(yīng)不同反光度產(chǎn)品


當(dāng)前檢測(cè)產(chǎn)品反光度較低,使用默認(rèn)的相位光斑無法正常投影到產(chǎn)品上,形成相位偏折效果。該系統(tǒng)提供多種正弦光斑可選,面對(duì)不同反光度產(chǎn)品時(shí)可根據(jù)圖像效果進(jìn)行選擇,如上圖3-13和圖3-15選用不同的正弦光斑,對(duì)應(yīng)的形狀圖效果大不相同。具有相位偏折變化的原圖,對(duì)應(yīng)的形狀圖中可明顯呈現(xiàn)2.5D類型特征。
特點(diǎn)5 超快的計(jì)算效率
該系統(tǒng)可提供圖像預(yù)處理器或預(yù)處理算子對(duì)原圖進(jìn)行處理,通過使用GPU加速,獲得超快的計(jì)算效率。在特定圖像大小的對(duì)比下,領(lǐng)先同行接近一半的處理效率,為用戶節(jié)省CT時(shí)間,提升檢測(cè)效率。




 投訴建議
投訴建議
提交


瞬間爆閃!滿足更短曝光時(shí)間需求的應(yīng)用場(chǎng)景
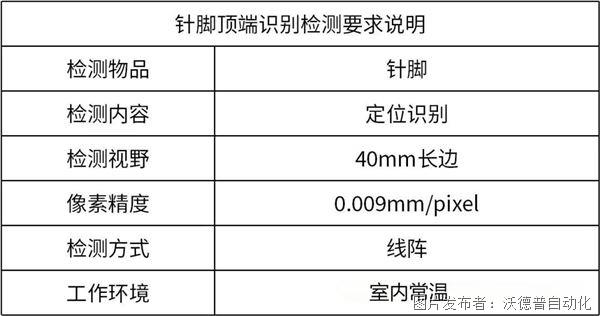
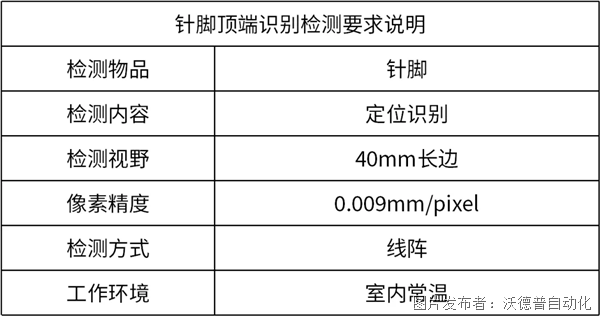
案例速遞|針腳頂端識(shí)別檢測(cè)
案例速遞|藥丸雜質(zhì)檢測(cè)

案例速遞|藍(lán)牙耳機(jī)充電倉觸點(diǎn)定位檢測(cè)
悟空相位成像系統(tǒng)-鋁殼電池表面瑕疵檢測(cè)